Création d’un service
Dans cette partie, nous allons créer un service simple, le déployer et le scaler (c’est à dire modifier le nombre de containers instanciés pour celui-ci). Nous changerons également la disponibilité d’un node pour voir l’impact sur les tâches en cours.
Pré-requis
Vous pouvez utiliser un Swarm que vous avez créé lors des exercices précédent, ou bien en créer un nouveau. N’hésitez pas à vous reporter aux cours ou bien aux exercices précédents si vous avez besoin de revoir le process de création.
Création d’un service
Utilisez la commande suivante pour créer le service nommé vote ayant les spécifications ci-dessous:
- basé sur l’image instavote/vote:latest
- publication du 80 sur le port 8080 des nodes du Swarm
- 6 réplicas
Le nombre de réplicas correspond au nombre de tâches qui seront instanciées pour ce service. Chaque tâche lancera un container basée sur l’image définie dans le service.
Lancez cette commande dpuis un node qui a le status de manager.
$ docker service create \
--name vote \
--publish 8080:80 \
--replicas 6 \
instavote/voteAprès quelques secondes, le temps que l’image instavote/vote:latest soit téléchargée sur chaque node, les 6 tâches du services sont lancées.
iloiyvba6uensc6bzvhvbxv93
overall progress: 6 out of 6 tasks
1/6: running [==================================================>]
2/6: running [==================================================>]
3/6: running [==================================================>]
4/6: running [==================================================>]
5/6: running [==================================================>]
6/6: running [==================================================>]
verify: Service convergedUtilisez la commande suivante pour lister les tâches du service vote.
$ docker service ps voteVous devriez obtenir un résultat proche du résultat suivant (aux identifiants près), indiquant qu’il y a 2 tâches par node.
ID NAME IMAGE NODE DESIRED STATE CURRENT STATE ERROR PORTS
xnon20jonsfd vote.1 instavote/vote:latest node2 Running Running 13 minutes ago
rganh2g8y8b7 vote.2 instavote/vote:latest node3 Running Running 13 minutes ago
on8oog1833yq vote.3 instavote/vote:latest node1 Running Running 13 minutes ago
hmp2wtvojxro vote.4 instavote/vote:latest node2 Running Running 13 minutes ago
vdizjy291q4t vote.5 instavote/vote:latest node3 Running Running 13 minutes ago
mjpn0ybsg6pj vote.6 instavote/vote:latest node1 Running Running 13 minutes agoLe service publie le port 80 sur le port 8080 du swarm via le mécanisme de routing mesh. Cela signifie que le service sera accessible depuis le port 8080 de chaque node du cluster. Nous pouvons vérifier le routing mesh en envoyant une requête sur le port 8080 de node1, node2 ou node3. Quelque soit le node sur lequel la requête est envoyée, nous aurons accès à l’interface de l’application. Nous reviendrons en détails sur le routing mesh un peu plus tard dans le cours.
Note: Seule la partie front-end est disponible sur cet exemple, il n’y a pas le backend permettant de prendre en compte la sélection.
Les requêtes envoyées sur le port 8080 d’un node du Swarm sont traitées selon un algorithme de round-robin entre les différents containers intanciés pour le service. Cela signifie que chacun des containers recevra une requète à tour de rôle.
Nous pouvons l’observer en lançant plusieurs requêtes à la suite et observer l’identifiant ID du container depuis l’interface web
Ajout du service de visualisation
Utilisez la commande suivante pour lancer un service qui servira à la visualisation des containers sur le cluster.
$ docker service create \
--name visualizer \
--mount type=bind,source=/var/run/docker.sock,destination=/var/run/docker.sock \
--constraint 'node.role == manager' \
--publish "8000:8080" dockersamples/visualizer:stableCe service a la spécification suivante:
- il est nommé visualizer
- il fait un bind-mount de la socket /var/run/docker.sock/ afin de permettre au container du visualizer de dialoguer avec le daemon Docker sur lequel il tourne
- il utilise une contrainte de déploiement pour que le replica du service tourne sur le node qui a le rôle manager
- il publie le port 8080 sur le port 8000 sur chaque hôte du Swarm
Nous pouvons alors voir la répartition des containers sur les nodes via l’interface du visualiseur. Cette interface donne le même résultat que lorsque l’on liste les service en ligne de commande, mais c’est une façon assez ludique de visualiser les containers.
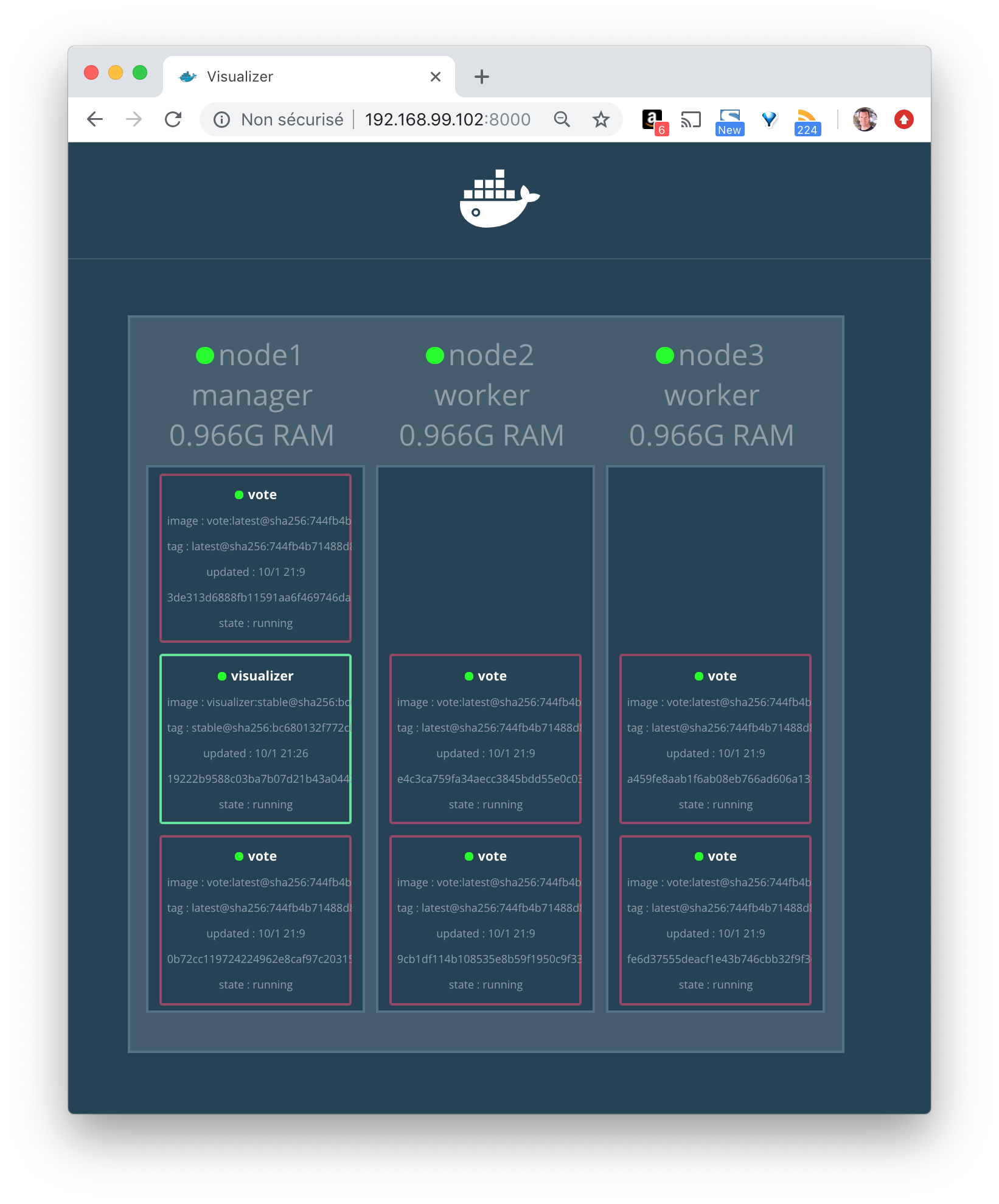
Note: le visualizer tourne sur le node master mais il est possible d’y accéder depuis n’importe quel node du Swarm grace au mécanisme de routing mesh
Passage du node2 en drain
Un node est dans l’un des états suivants:
- active, il peut recevoir des nouvelles tâches
- pause, il ne peut pas recevoir de nouvelles tâches mais les tâches en cours restent inchangées
- drain, il ne peut plus recevoir de nouvelles tâches et les tâches en cours sont re-schédulées sur d’autres nodes
Avec la commande suivante, changez l’availability du node2 en lui donnant la valeur drain.
$ docker node update --availability drain node2 Depuis le visualizer, regardez comment la répartition des tâches précédentes a été modifiée.
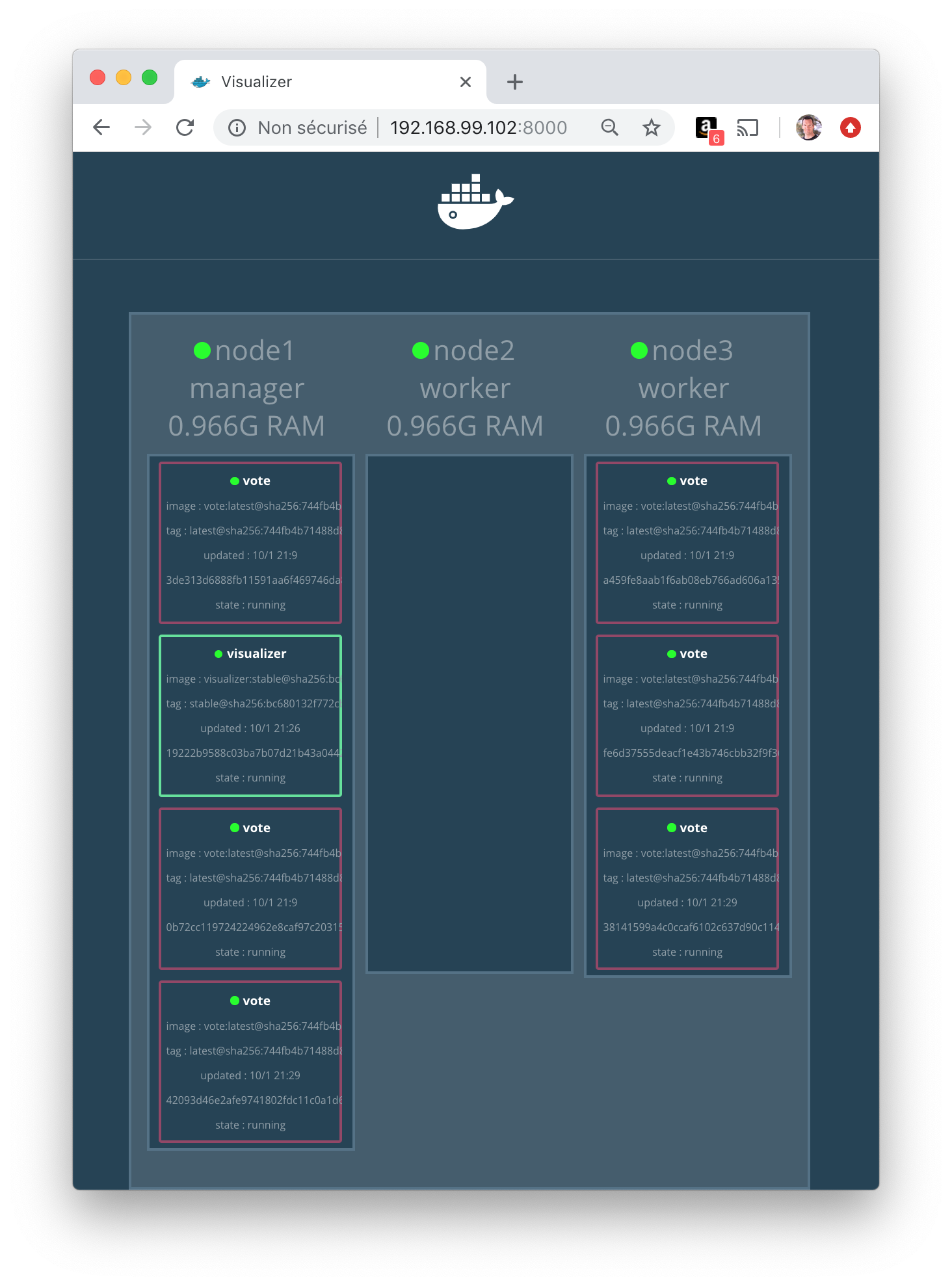
Nous pouvons voir qu’il n’y a plus de tâche sur le node2. Elles ont été stoppées et reschédulées sur les autres nodes.
La commande suivante change l’availability du node2 en le repositionnant dans l’état active. Les tâches existantes sur node1 et node3 restent inchangées mais de nouvelles tâches pourront de nouveau être schédulées sur node2.
$ docker node update --availability active node2En résumé
Nous avons vu dans cette mise en pratique comment créer des services très simples. Nous avons également vu l’influence de la propriété availability d’un node par rapport à la répartition des tâches des services.